文章:松下A5伺服驱动器的速度控制方式(一)
所有者:TerryWang(呢称); 发布时间:2021-06-13 10:17:33; 更新时间:2021-06-13 10:25:18
阅读所需积分:0;
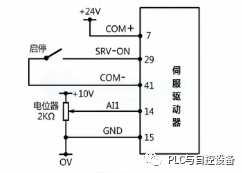
简介:以上为广告A5伺服驱动器的速度控制方式(一)伺服驱动器的速度控制方式就相当于变频器加编码器反馈速度的矢量运行控制方式。《变频器的5种控制方式,你知道吗?》松下A5伺服驱动器的速度控制方式,首先要设置控制方式选择参数pr0.01。设定值第一方式第二方式0位置无1速度无2转矩无3位置速度4位置转矩5速度转矩6全闭环无单纯的速度控制方式,把参数设定为1。当选择两种
A5伺服驱动器的速度控制方式(一)

伺服与运动控制
https://mp.weixin.qq.com/s/IeuC8qS1B2WBkRbjUw6NbQ